I am a Research Scientist at the Max Planck Institute for Intelligent Systems
in Tübingen,
working in Michael Black's group.
My research focuses on the intersection of digital humans, generative models, and
machine learning.
Previously, I obtained my PhD in 3D scene understanding at The University of
Edinburgh under Prof. Bob Fisher,
and worked at Microsoft Mixed Reality under Tadas
Baltrušaitis.

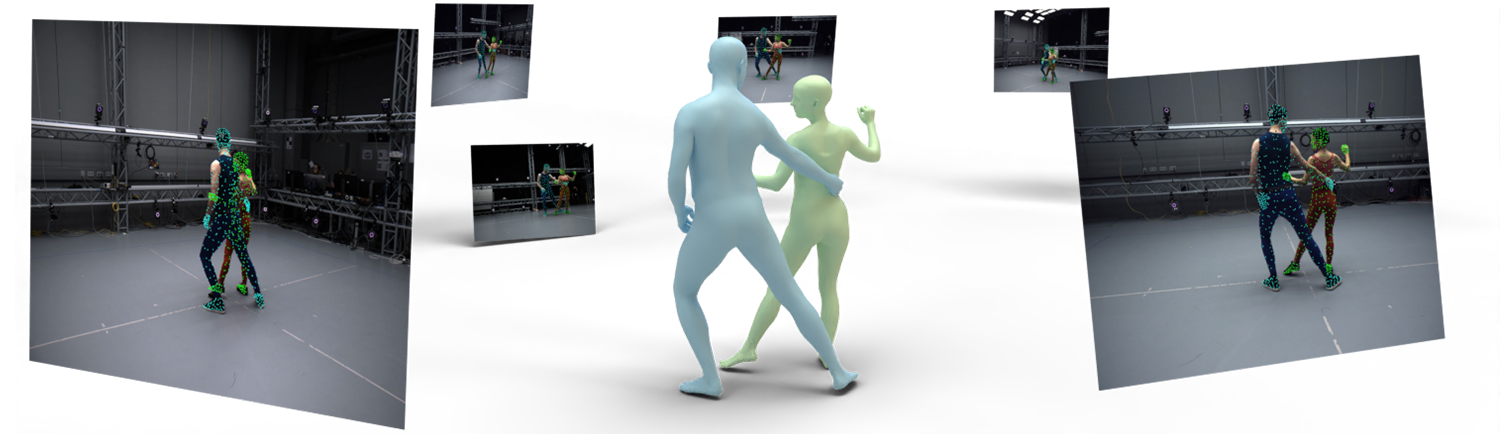
Markerless motion-capture pipeline that accurately recovers SMPL-X parameters from multi-view video of two-person interaction sequences.
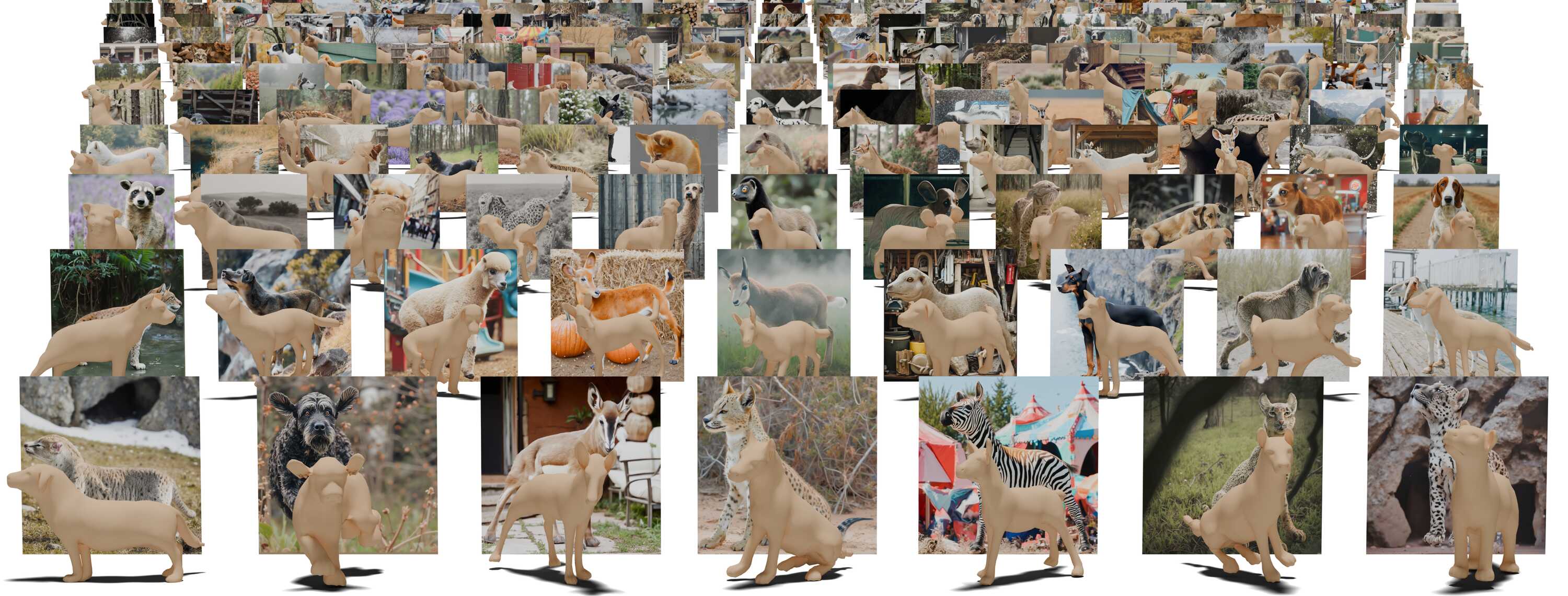
We propose a pipeline for the scalable generation of realistic 3D animal pose and shape estimation training data.
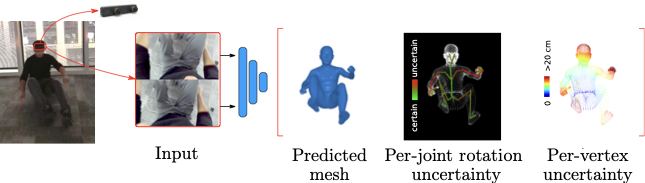
Predicting probabilistic body pose from egocentric cameras, addressing occlusion and limited field of view.

Controllable synthesis method that balances image realism with precise ground truth (Generative BEDLAM).
Synthesis of novel head poses, expressions, and gazes from short cellphone videos.

Parametric model of the face and body and rendering pipeline to generate realistic images of humans.
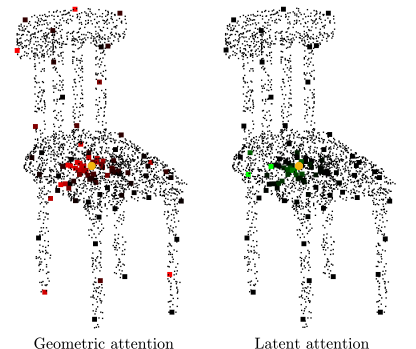
Two-headed attention layer combining geometric and latent features for point cloud segmentation.

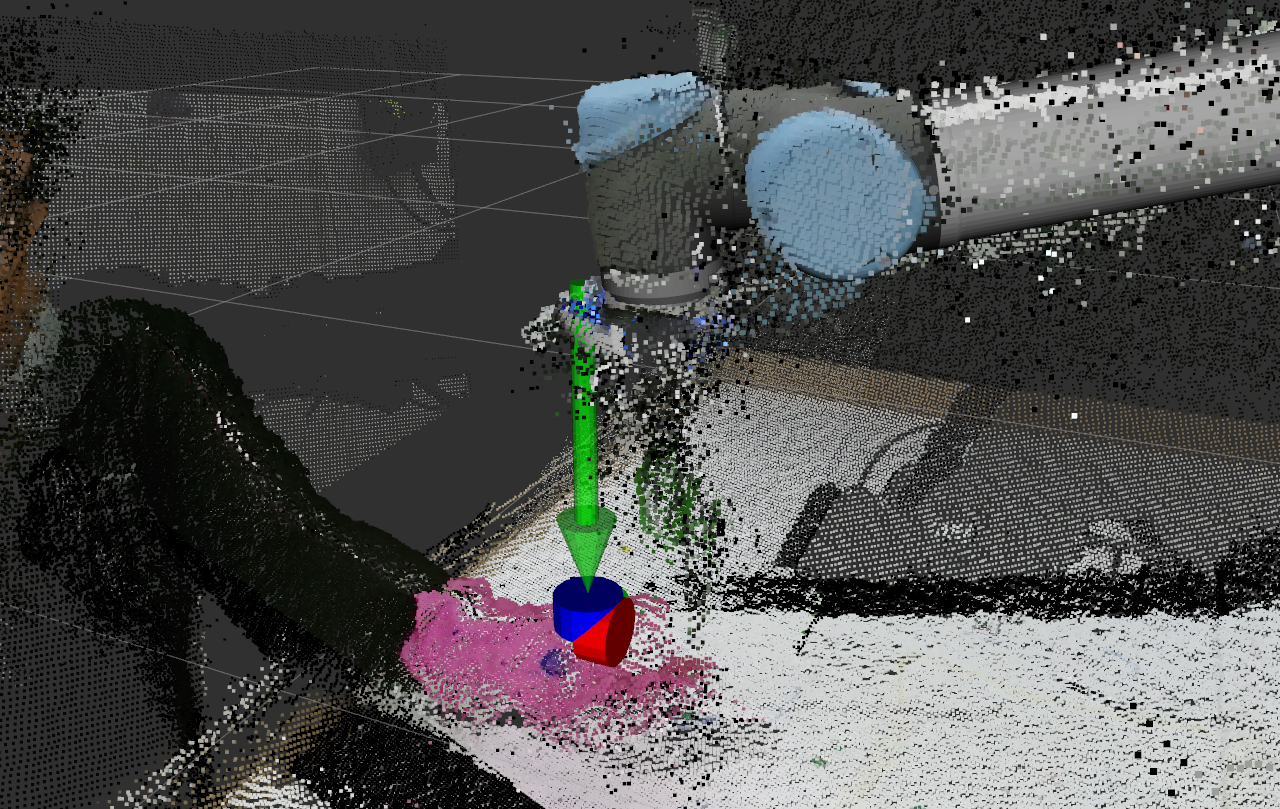
Visual servoing to find and cut rose branches in real-time using a robotic arm.
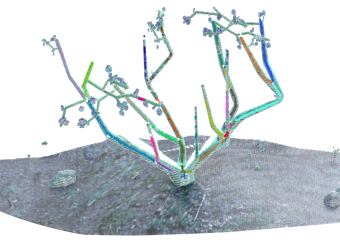
Method for performing the segmentation of branches and recovering their morphology in 3D for a garden robot.
Max Planck Institute - Tuebingen (Michael Black's group)
The University of Edinburgh
Microsoft
The University of Edinburgh
The University of Edinburgh
Universidad Catolica Boliviana "San Pablo"